KnowRob at ICRA 2018
We are proud to announce that the second generation of the KnowRob has been presented at ICRA'18 in Brisbane Australia.
KnowRob was first introduced in 2009 [1] where Tenorth and Beetz argue that autonomous robot control demands KR&R systems that address several aspects that are commonly not sufficiently considered in AI KR&R systems, such as that robots need a more fine-grained action representation. This was pointed out early by Tenorth and Beetz [2] when they argued that service robots should be able to cope with (often) shallow and symbolic instructions, and to fill in the gaps to generate detailed, grounded, and (often) real-valued information needed for execution.
We have introduced the second generation of the KnowRob system at ICRA'18 [3] where the focus of development has shifted towards the integration of simulation and rendering techniques into a hybrid knowledge processing architecture. The rational is to re-use components of the control program in virtual environments with physics and almost photorealistic rendering, and to acquire experiential knowledge from these sources. Experiential knowledge, called narrative enabled episodic memory in KnowRob, is used to draw conclusions about what action parametrization is likely to succeed in the real world (e.g., through learning methods) – this principle is inspired by the simulation theory of cognition [4].
The architecture blueprint for KnowRob 2.0 is depicted below.
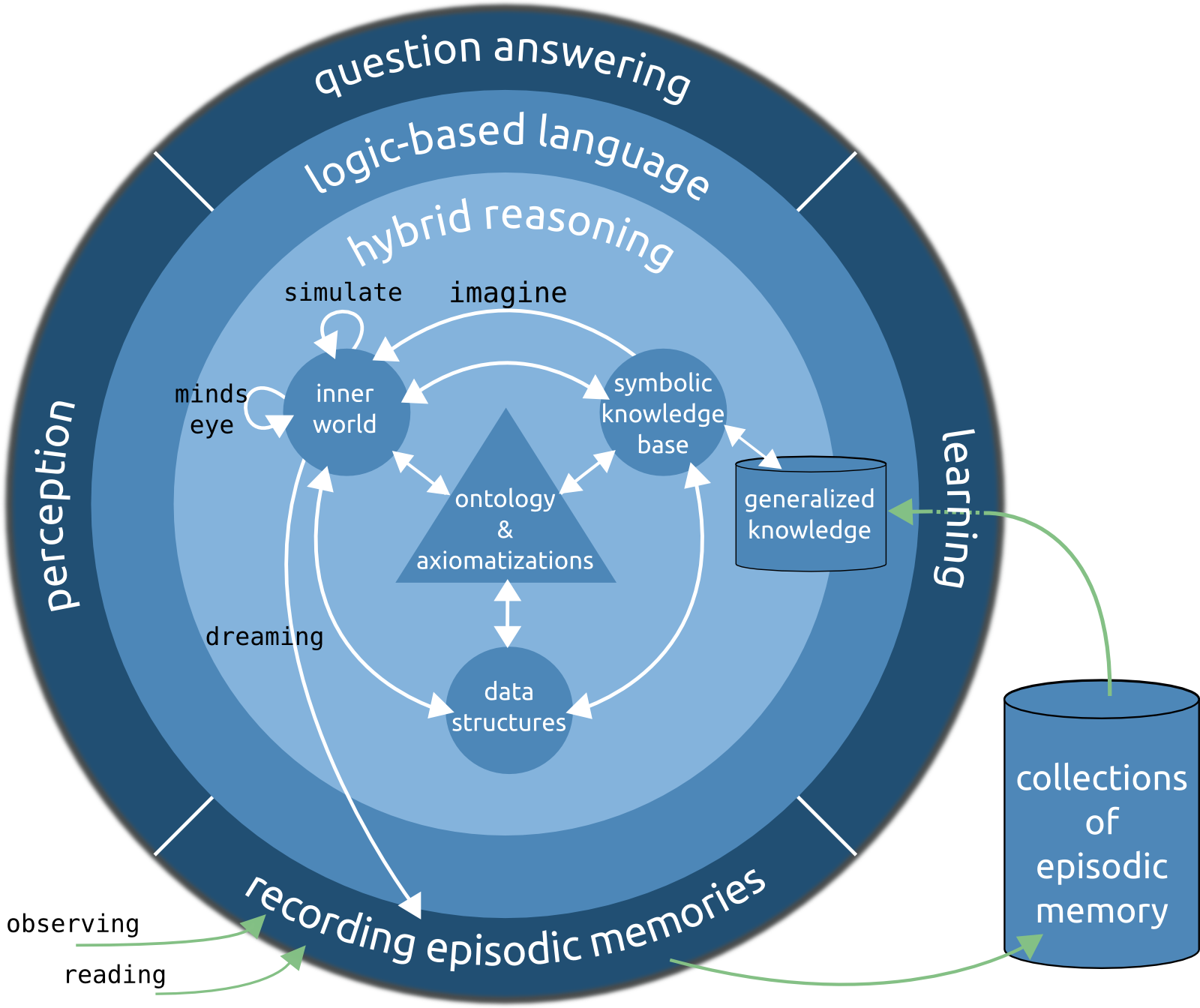
Displayed components exist at least prototypically, and will be elaborated more in future publications.
[1] Moritz Tenorth, Michael Beetz,
"KnowRob – knowledge processing for autonomous personal robots",
In: IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, pp. 4261–4266, 2009.
[2] Moritz Tenorth, Michael Beetz,
"Representations for robot knowledge in the KnowRob framework",
In: Artificial Intelligence, Elsevier, 2015.
[3] Michael Beetz, Daniel Beßler, Andrei Haidu, et al.,
"KnowRob 2.0 – A 2nd Generation Knowledge Processing Framework for Cognition-enabled Robotic Agents".
In: International Conference on Robotics and Automation (ICRA), 2018.
[4] Germund Hesslow,
"The current status of the simulation theory of cognition",
In: Brain Research 1428, pp. 71–79, 2012.
